|
|
|
ArduPlaneの製作DIY Dronesのページ↓http://diydrones.com/ ボードの購入はこちらから↓ http://www.japandrones.com/ ----------------------------------------- R/C無尾翼機をArduPlaneに改造,その1 10年以上前に作ったR/Cの無尾翼機.これを元にArduPlane改造できないか考えました. 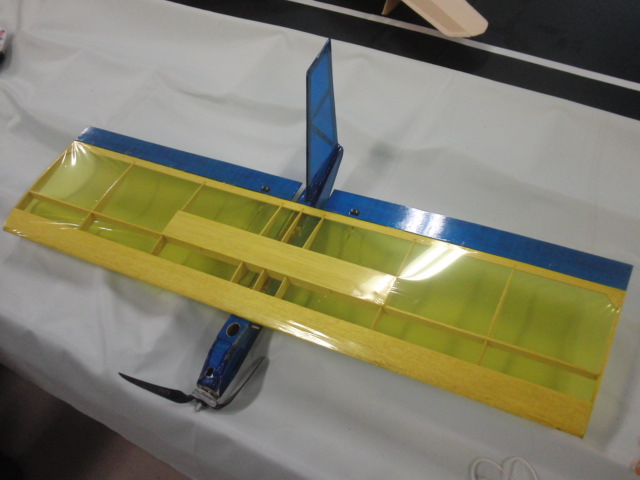 コントローラのAPM2.5を載せようとしても横幅が狭すぎ,バッテリーの収納も難あり. 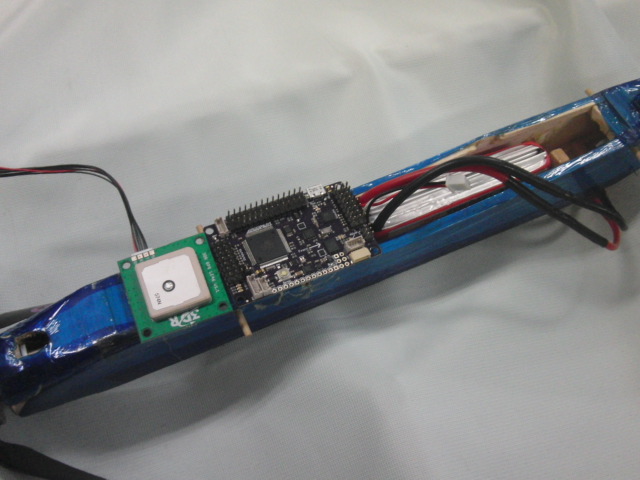 惜しまれつつも,いっきに解体. 積んでいたモータはこれ↓ QRPのモータとギヤダウンユニット,ペラ合わせて128g. 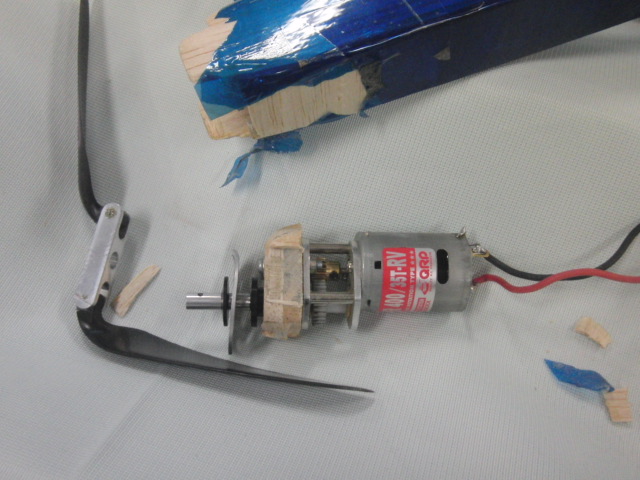 こんなイメージで幅を広げて機体を作り直します↓ そのうちに. 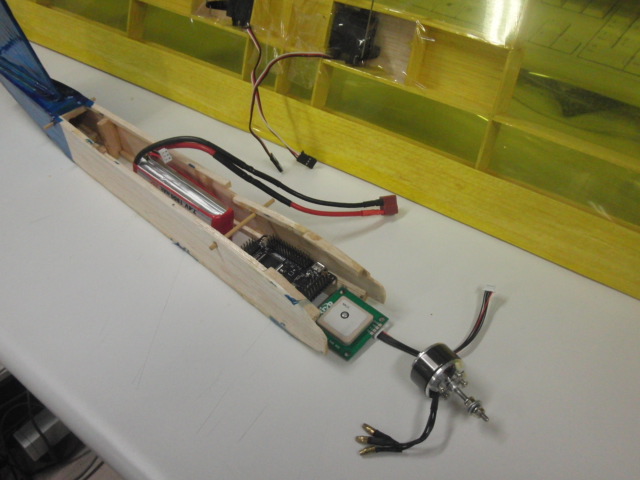 ----------------------------------------- R/C無尾翼機をArduPlaneに改造,その2 350-400クラス相当のブラシレスモータとLipo1900mAhを載せて,389g.フィルムを貼って,ケーブルを配線して,450g以内にはおさまりそうです. 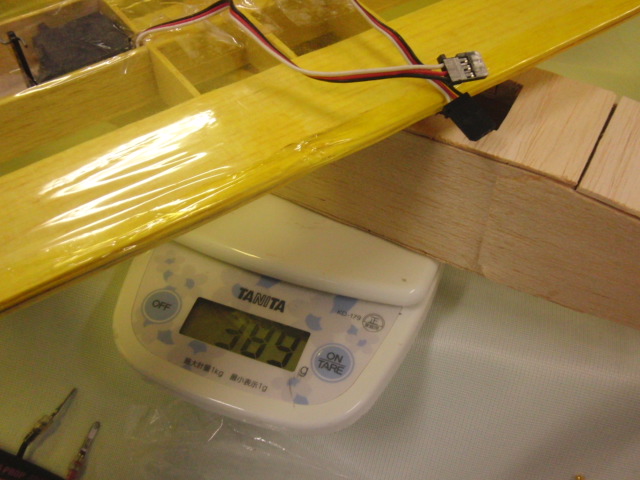 --追記-- フィルム貼った.アンプつないでモーターを回してみた.スロットル2/3で5Aくらいで結構引っぱる.3Aくらいでレベルキープ位か.20分くらいは飛んで欲しい. 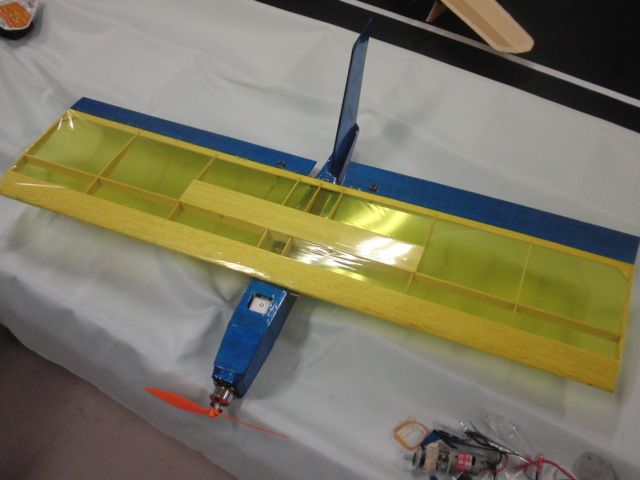 ----------------------------------------- R/C無尾翼機をArduPlaneに改造,その3 APM2.5にArduPlaneのファームを書き込んでPCのと接続して調整中. とりあえずつないでみて英語のWikiを斜め読みしながらやってます. エレボンの時の接続の説明通りに接続,1ch左,2ch右,3chスロットル. モード切替のためにギヤを8chにいれる. 送信機側をエレボンに設定. 受信機のキャリブレーションのところで,送信機の信号の上限下限と, エレボンのミキシング,チャンネルの反転の設定をした. 8chのモード切替でmanualとstabilizeの切替をするように設定. Manualモードでは送信機の通りに動作.stabilizeに切り替えると,Manual信号を基準にコントロールボードの傾きにに合わせて調整が入った. 切り替えた時にスロットルがoffになったのはなぜ? とりあえず配線はこれでよさそうなので機体に納める. 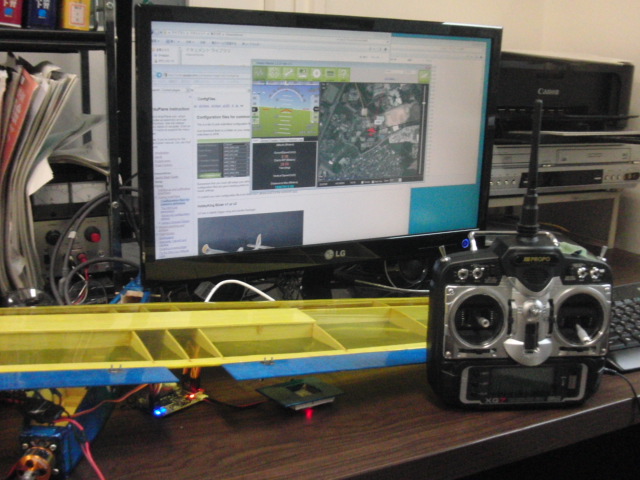  センサの出力を表示させてみた動画 ----------------------------------------- R/C無尾翼機をArduPlaneに改造,その4 ArduPlaneの試験飛行. まずプロペラなしで滑空性能をみる. 重いとダメージが大きいので小さなバッテリーで. 投げたら前重心になりすぎてたのでバッテリーを後ろにずらしエレベータアップ. 数回投げてトリムとリンケージ調整後stabilizeモードで投げると姿勢安定するが失速ぎみ. これは,水平を基準にしたためか? グライダー的には頭下げが基本だけど,通常飛行では動力があるので水平飛行が基準で多分問題なし. 次はプロペラをつけて飛行試験.滑空できてるのでプロペラ回せば普通に飛ぶはず. --追記-- プロペラを付けて飛ばしてみました.3D動画をyoutubeにアップしました. Manualとstabilizeモードでのテスト飛行の3D動画です.安定性がなく操縦が難しい機体ですが飛ばしながらトリム調整して徐々に安定してきました.滑空性能はないですが,プロペラを回して飛ばせば大丈夫です. stabilizeモードにすると逆に操縦が難しくなったのでパラメータ調整が必要のようです. この機体はモーターを回して少し機首上げの状態を基準にした方が安定が良いようなので,その状態で制御パラメータを調整してみます. 3Dで動画を撮ってみました→ 無尾翼ArduPlaneの3Dテスト動画 広告↓  リアルdeアートな切り紙飛行機の設計 普通翼機、先尾翼機、無尾翼機を作って四季の爽風に乗せてみよう (単行本・ムック) / 大空翔/著 ----------------------------------------- R/C無尾翼機をArduPlaneに改造,その5 stabilizeモードで安定飛行できました. 以下,そのメモ書き. 初期は,機体水平を基準レベルとする. ペラ無しで滑空させたら,滑空性能は悪い. トリムとリンケージ調整をした. その後飛行,Manualモードでプロペラを回すと操縦できたが, Stabilizeモードだとどんどん下がってきて機体も安定しない. 機首水平だとだめ,制御係数も高すぎるのか? 調整 水平レベルを前2cmあげた状態を基準に調整した. プロペラ飛行時は,機首あげになっていないといけないため. パラメータの調整 Servo Roll Pid P 0.4 -> 0.2 Servo Picth Pid P 0.6 -> 0.3 それぞれ半分に変えてみた. 結果 Stabilizeモードの切り替えると少し下降気味,後少し機首上げが足りない. エレベータトリムをアップすると丁度いい感じになった. ただし,その状態でManualにすると機首上げ気味になって操縦しずらい. Stabilizeモードで安定飛行している状態では, エレベータ,ラダーの操作なしでほとんど直線飛行する. 風が強かったが風に向かっている方向だとほぼ直進. 風が横から当たると流されるが大きく姿勢が崩れることはない. スロットルが中央よりちょっと下でレベル維持. 上げ下げすると上昇,下降する. 一低高度で飛行するには微妙なスロットル操作が必要. ラダーを切ると傾いて旋回,戻すと水平飛行に戻る. エレベータも同じで離すと水平に戻る. 着陸は風に向かってスロットルを絞りながらゆっくりアプローチして 高度1m位でスロットルオフ. 着地直前にエレベータフルアップでブレーキをかける. プロペラはゴム固定なのでふにゃっとなるが,折れたりゴムが切れたりはしない. スロットルオフしても風でプロペラが回りっぱなしなのでハンドキャッチはちょっと危険. 折ペラ買って交換するか. 7.4V,600mAhで15分ほど50-200mを飛行. フル充電から定格値くらいまで電圧が下がった. 地上で固定してスロットル中央で回した時,電流は2.2A. 飛行時は抵抗が下がるので電流もちょっと下がるとして, 計算上は20分ほど飛行が可能. 機体重量はバッテリーなしで294g, 600mAhバッテリー込みで330g.1900mAhで430g. --追記-- ちょっと機首上げしてレベル調整するための治具を作りました. 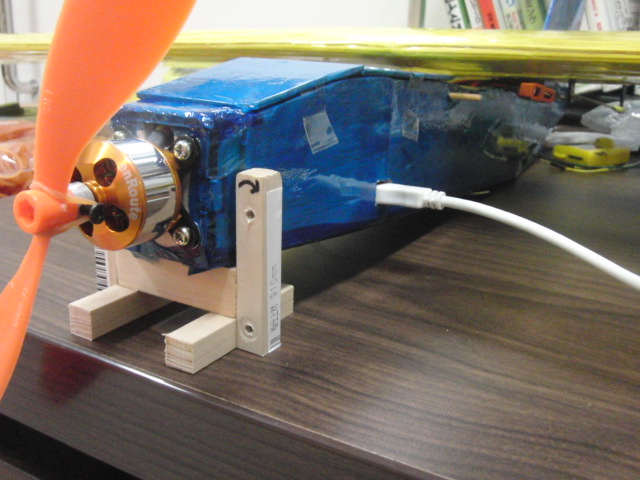 ----------------------------------------- R/C無尾翼機をArduPlaneに改造,その6 ArduPlane墜落した... その動画 ほぼ安定飛行ができてたので,無視してたupdateをしてPIDのパラメータだけ確認して,ちょっと調整して飛ばしてみた. Stabilizeモードに切り替えたとたんにキリモミして墜落.ペラ破損,尾翼破損,モーターがちょっと異音. 調べてみると,Stabilizeモード自体はよさそうだけど,ちょっと操縦をかけるとサーボがっむちゃくちゃな動作をした.どうやら,最初のR/Cのキャリブレーションがリセットされてるようだ. !!!アップデート要注意!!! あちこち修理して,もう一度キャリブレーションやレベル調整をやり直し. 飛ばしてみたら,綺麗に安定飛行した.わずかに曲がる傾向があったので トリムで調整したら手放しで直線飛行するようになった. でもAutoで安定して飛ぶためにはR/Cなしで安定飛行しないといけないはずなので,最初のレベル調整をちょっとだけ傾けててまた試してみる. stabilizeモードでの飛行中の動画 ----------------------------------------- R/C無尾翼機をArduPlaneに改造,その7 Stabilizeモードで飛行できたら,次はフライバイワイヤーモードで飛ばすとオンラインマニュアルにある. 切り替えると高度維持して飛ぶらしい. http://code.google.com/p/ardupilot-mega/wiki/Tuning ロール,ピッチの角度上限や調整について書いてある. 角度上限は良いとして,ナビ制御用のパラメータの比例係数ほかは多分あげないといけない. 制御用パラメータは,例えば目的の方向に対して反対方向を向いている時の旋回させるための制御量の比例係数. 機体の姿勢制御が緩やかになったので自動航行の舵角も半分になっている. ナビ制御パラメータが初期値のままで,姿勢制御パラメータを下げた状態では,反対方向を向いてもわずかしか変化しない. 双方初期値のままで反対方向を向いた時の舵角と同じくらいの変化をさせるためにはナビ制御のパラメータを2倍しないといけない. 室内でPCでにつないで向きを変えながら,適当な舵角になるように,押さえ気味で以下のようにパラメータを少しずつあげた. Nav Roll Pid P 0.7 -> 1.2 I 0.02 -> D 0.1 -> Nav Pitch AS Pid P 0.650 -> 1.1 I 0.1 -> D 0 Nav Pitch Alt Pid P 0.650 -> そのまま I 0.1 D 0 Autoモードで位置を変えながら自動操縦できるらしい. マップ上に2点のWaypointを設定.高度は100mとした. 設定した高度は初期値から相対高度で100m上まで上がるらしい. グラウンドの標高が80mほどなので,約180mまで上昇する予定. 試験飛行 風が強かった.風速5-10m/sくらいなので,フライバイワイヤーで調整はできないので, その先の,Autoの自動操縦を試して見ることにする. まず,Stabilizeモードで手動操縦で風に向かって飛ばしながら十分な高度に上げた. Autoモード切替後,最初のウェイポイントに流されるように進んだ. その後戻ってきたので,最初のポイントはクリアして次のウェイポイントに向かっているようである. 風にほぼ相対しながら,横に滑るように次のウェイポイントに向かっている. しかし,風が強いので後ろに押し流されているようで,このままでは危険なので ウェイポイントに達するのを待たずに手動に切替えて着陸させた. その後,GoogleEarthでログを確認. 飛行目線の動画は本当に飛んでいるようだ.飛行中の高度は,設定通り180m前後. 座標の履歴と手描きメモがこちら(テキトーな感じですみません)↓ 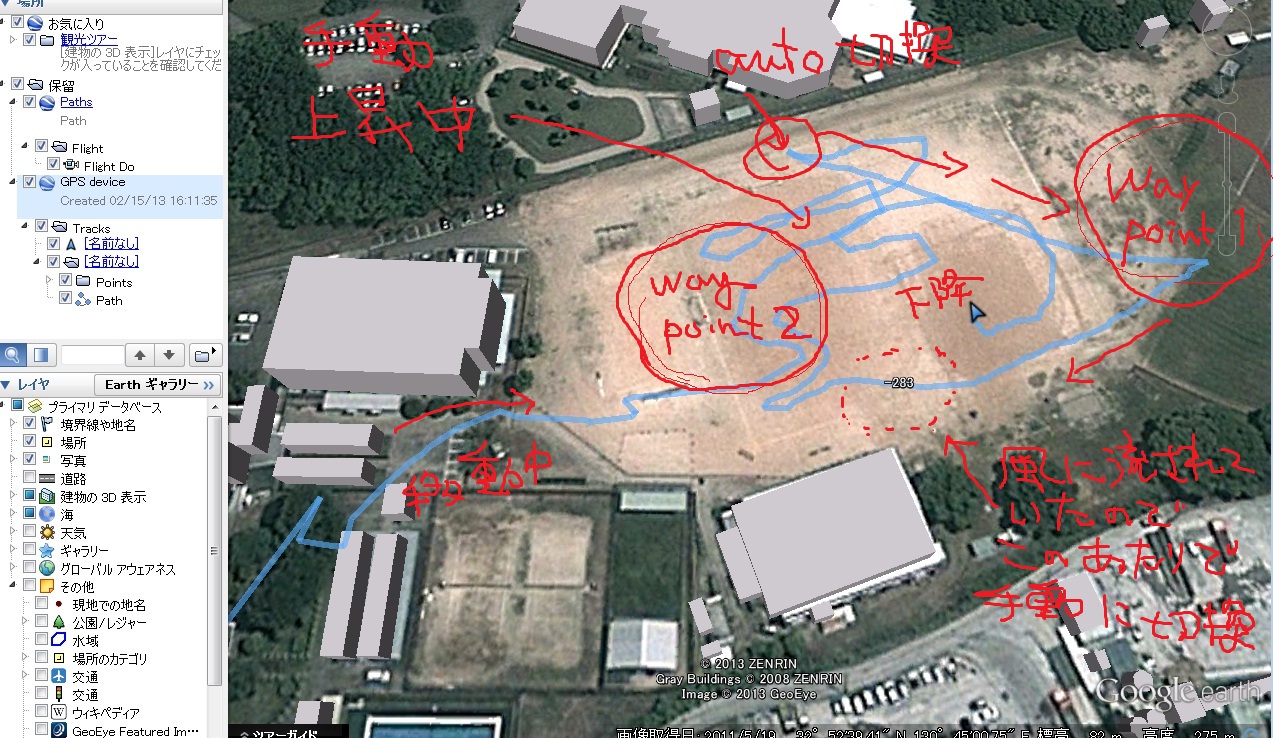 いちおうGPSを使ってAutoモードでも飛ぶであろうことが確認できた. 風がなかったら多分問題なく自動操縦できるだろう. その時の動画はこちら→ ArduPlaneを強風でオートパイロットさせてみた ----------------------------------------- ジャンル別一覧
人気のクチコミテーマ
|



